Archive for category SLAM
300,000 SF in less than 12 hours.
Posted by Jim Foster in BIM, BOMA, Existing Conditions, SLAM on October 3, 2016
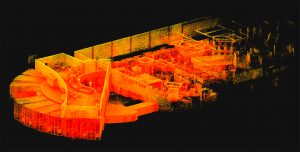
 Building on my earlier SLAM post, we’ve been utilizing the combination of SLAM and PKNail Pro to great success. Recently we completed over 300,000 SF of office tower in Wilmington, DE with the total time on site coming in just under 12 hours, yes that’s right 12 hours. The scope of the project included BOMA reporting and CAD, and while the parking garages were not initially part of the scope, we walked the garage with SLAM so had a 3D database in case it was needed in the future, and in this case, it was needed in less than a week and we did not need to revisit the site, saving the client both time and money.
Building on my earlier SLAM post, we’ve been utilizing the combination of SLAM and PKNail Pro to great success. Recently we completed over 300,000 SF of office tower in Wilmington, DE with the total time on site coming in just under 12 hours, yes that’s right 12 hours. The scope of the project included BOMA reporting and CAD, and while the parking garages were not initially part of the scope, we walked the garage with SLAM so had a 3D database in case it was needed in the future, and in this case, it was needed in less than a week and we did not need to revisit the site, saving the client both time and money.
Process: Walk each floor with SLAM, create 3D database by floor. Build out interiors, sample floor, with PKNail Pro, capturing typical window assemblies, doors, plumbing objects, wall thicknesses. Back office included the combination of surveying data, creating spaces within Revit and exporting both spreadsheet data, CAD and plotted floor plans.

SLAM : A Revolution in Building Surveying & Documentation
Posted by Jim Foster in 3D, BIM, Built Environment, Existing Conditions, New Technologies, Open Engine, SLAM on October 3, 2016
 SLAM technology. SLAM, besides sounding rather cools stands for ( Simultaneous Localization and Mapping). And this is is an evolution in the creation of point clouds. Why? SLAM technology allows a user to walk through space, and in essence, create a continuous point cloud of an entire space. Previous technologies require a machine to be placed on a tripod, and continually set up in different locations. To get a full ‘picture’ of whatever you are scanning separate scans have to be ‘stitched’ together, which is not as automated a process as you might imagine. While Leica continues it onslaught of proprietary products and continuous scanning with its Pegasus systems, SLAM is based on open standards and researched extensively through the robotics industry. Off the shelf technology in the form of Hitachi Lasers, Rasberry Pi Processors and the like will start to open up new devices and allow new manufacturers to enter what has been a highly technical and closed field.
SLAM technology. SLAM, besides sounding rather cools stands for ( Simultaneous Localization and Mapping). And this is is an evolution in the creation of point clouds. Why? SLAM technology allows a user to walk through space, and in essence, create a continuous point cloud of an entire space. Previous technologies require a machine to be placed on a tripod, and continually set up in different locations. To get a full ‘picture’ of whatever you are scanning separate scans have to be ‘stitched’ together, which is not as automated a process as you might imagine. While Leica continues it onslaught of proprietary products and continuous scanning with its Pegasus systems, SLAM is based on open standards and researched extensively through the robotics industry. Off the shelf technology in the form of Hitachi Lasers, Rasberry Pi Processors and the like will start to open up new devices and allow new manufacturers to enter what has been a highly technical and closed field.
While SLAM devices do not have the high fidelity of HDLS, it does allow for some pretty excellent data collection that is typically at a level needed for most building documentation, leaving highly specific / detailed tasks for the more heavyweight scanners, think exposed and extensive MEP, physical plans, historic documentation/reconstruction. Personally, using SLAM devices in combination with our PKNail Pro allows us to move through spaces quickly, efficiently, accurately capturing building geometry with both systems and creating dimensionally accurate Revit objects on the fly with PKNail Pro. This allows us to get in and out of space with minimal interruptions, and allows for quick turn around which is great for building owners/investors through due diligence, BOMA calculations or looking to repurpose/reprogram a building. Recently, we were in and out of 300,000SF of tower in Wilmington Delaware in less than 36 hours.
While SLAM allows for the quick collection of data, interpreting, understanding the data and turning the data into usable documentation still remains very much a craft process. Too many times I have seen a product, such as a Revit model, turned out by groups who fail to understand how building are put together and designed which eventually turns into a product that confuses and confounds the people/architects who need to use it. In the next post I hope to dive into this process vs. product a bit deeper.
-
You are currently browsing the archives for the SLAM category.
