Posts Tagged SLAM
SLAM and Drones and HDLS….oh my
Posted by Jim Foster in Uncategorized on October 5, 2018
SLAM and Drones and HDLS….oh my.
There seems to be new tech, and “reality capture” methods popping up on the daily. The lens that I look at it through though is how can any of the technologies and methods get us to a point quicker and more accurately. No, we’re not in Kansas anymore.
SLAM (simultaneous localization and mapping ) , these devices and specifically the ones developed by GeoSlam, was the first time I bought a demo and did not want the rep to leave my office with what he brought. The conversation went something like this “I’ll take it”. “Okay we can write you up and deliver….” “No I’ll take what you have in your hands right now, how much” and subsequently we bought another. As far as the combination of speed, cost and quality (granularity of data) I have found it pretty remarkable in what it does. It has its limitations though and why we augment SLAM data with other collection methods to get us to a better whole, and again; this depends on the scope of the project.
Many of you, certainly if you are reading this, are familiar with HDLS (High Definition Laser Scanning) which most people just refer to as LIDAR . Why make the distinction? Because LIDAR really is the big tent, laser scanning as a whole, and all the machines, processes are the acts. HDLS typically requires individual set ups, the machines stay stationary and the process while slower and more cumbersome still produces the highest density of data. To help explain this I’ve come up with possibly a slightly less confusing metaphor or perhaps no help at all. Steam, water and ice. With steam water in the gas phase and it’s molecules are far part, relatively speaking, water, liquid phase are tight, and ice, water in solid form the molecules are tighter yet. With scanning the density of the points, like water molecules are tighter or farther apart based on the technology you are using and why we need to use different ones based on the scope of the project.
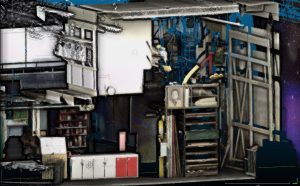 In the images I have included, the first one is created through HDLS using tripod mounted stationary FARO Focus. If you zoom in, you can see the handles on the cabinets, the images in the painting, etc, this is because the machine takes photos as part of the process, at least in this case) and maps them to the collected points, giving us a true 3D representation of the space, which is the back of a theater by the way.
In the images I have included, the first one is created through HDLS using tripod mounted stationary FARO Focus. If you zoom in, you can see the handles on the cabinets, the images in the painting, etc, this is because the machine takes photos as part of the process, at least in this case) and maps them to the collected points, giving us a true 3D representation of the space, which is the back of a theater by the way.
In the second I have included both the SLAM cloud and HDLS together, you can see where the SLAM backfilled around the objects and the cabinets, giving us data to model from, the extents of walls, heights and profiles of objects, etc.
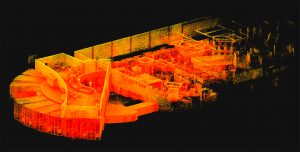
The last is solely a SLAM cloud, I can tell what and where the objects are but the cloud is just a mass, no photos, and the details/density would not allow us to determine, let’s say, the cabinet handles. Do you need definition of handles? Or in most cases of documenting existing, do you just need a volumetrically correct model that looks good in elevation and model view. We’ve completed projects where the client wanted a 3D database of almost  everything because they were retrofitting an HVAC package into an existing and very significant building. They wanted to A) document everything properly and B) be able to fabricate any objects from the data in case they were damaged during construction. This was obviously a case where we needed to create high def scans through out the entire building, in classrooms though, which did not have significant architectural detail we used our own software, PKNail, to create the geometry. It’s the ability to blend technologies and capture methods that allows a service provider to best serve the client from a detail and budgetary point of view. After you’ve completed the data collection, made sure all the data is registered to each other, even from disparate sources, that is SLAM with HDLS, with Drone captured data, etc. you’ll need to choose whether you want Revit or Autocad…but that’s an entirely different conversation, however, more times than not when using these technologies together you are creating a robust 3D data base of the building that can be revisited for any questions or even new documentation needs.
everything because they were retrofitting an HVAC package into an existing and very significant building. They wanted to A) document everything properly and B) be able to fabricate any objects from the data in case they were damaged during construction. This was obviously a case where we needed to create high def scans through out the entire building, in classrooms though, which did not have significant architectural detail we used our own software, PKNail, to create the geometry. It’s the ability to blend technologies and capture methods that allows a service provider to best serve the client from a detail and budgetary point of view. After you’ve completed the data collection, made sure all the data is registered to each other, even from disparate sources, that is SLAM with HDLS, with Drone captured data, etc. you’ll need to choose whether you want Revit or Autocad…but that’s an entirely different conversation, however, more times than not when using these technologies together you are creating a robust 3D data base of the building that can be revisited for any questions or even new documentation needs.

| PRO | CON | |
| HDLS | Best granularity of data. Point density. | Almost all machines are stationary so every shot needs to be set up and registered. Although software advances have helped in automation. Slower process. |
| SLAM | Quick, captures data at walking speed. Decent density for details and over all dimensions. Covers areas well where it has range. | Limited range. Occasional hiccups and data “drift” |
| Drone | Quickest, Exterior Only, great for massing and building geometry. Capturing data in hard or inaccessible places. Captures hi-res images of project. | Limited data density to pick up details. Object distortion. |
Pros and Cons of SLAM / HDLS / Drone ©Pointknown 2018
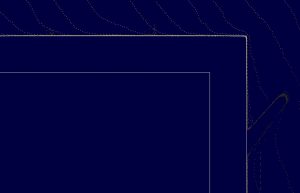
Below are some screenshots that will put most to sleep but if you’ve read this far, maybe not. The large one is of combined clouds (HDLS / SLAM) of a building we completed in LA. They were registered together, and rendered in Revit / ReCap. The first of the smaller ones is a close up of a wall with just the SLAM cloud. The second is the HDLS data overlaid the wall in Revit, the last is just the data. You’ll notice how tight the HDLS Line, with very little spread between the data points. The SLAM data looks faded in comparison and the “spread” between the farthest data point and closest is about 1/2”, that is the HDLS line looks like it was drawing with a ball point pen, the SLAM with highlighter. Experience in 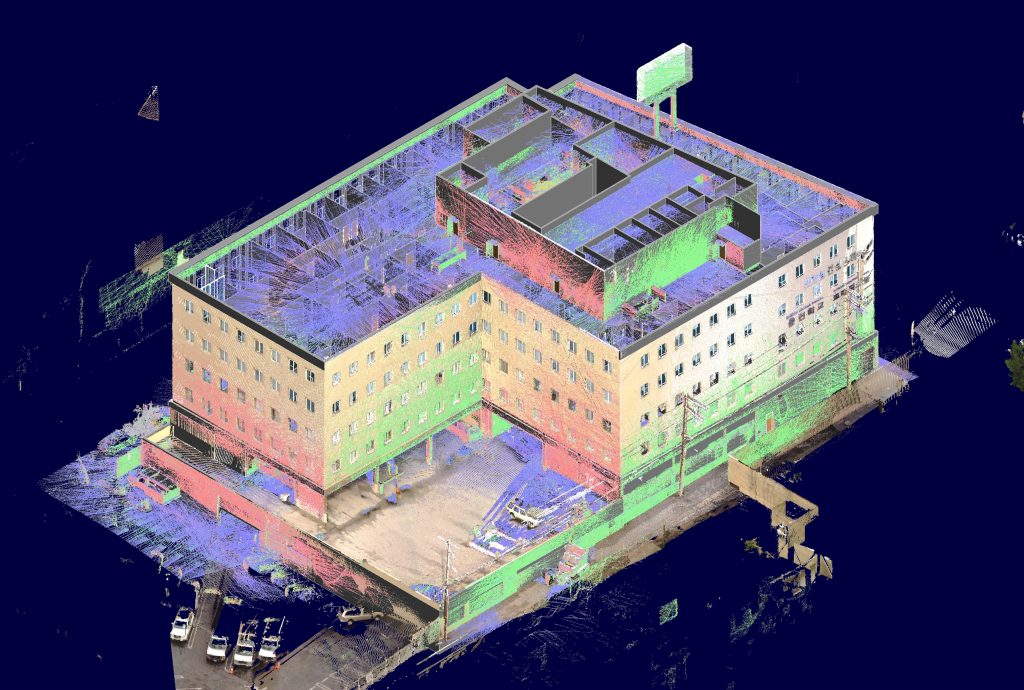 dealing with both sets, pro and cons can help
dealing with both sets, pro and cons can help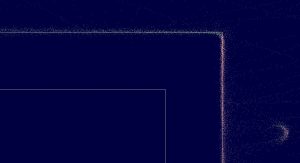 .
. 


300,000 SF in less than 12 hours.
Posted by Jim Foster in BIM, BOMA, Existing Conditions, SLAM on October 3, 2016
 Building on my earlier SLAM post, we’ve been utilizing the combination of SLAM and PKNail Pro to great success. Recently we completed over 300,000 SF of office tower in Wilmington, DE with the total time on site coming in just under 12 hours, yes that’s right 12 hours. The scope of the project included BOMA reporting and CAD, and while the parking garages were not initially part of the scope, we walked the garage with SLAM so had a 3D database in case it was needed in the future, and in this case, it was needed in less than a week and we did not need to revisit the site, saving the client both time and money.
Building on my earlier SLAM post, we’ve been utilizing the combination of SLAM and PKNail Pro to great success. Recently we completed over 300,000 SF of office tower in Wilmington, DE with the total time on site coming in just under 12 hours, yes that’s right 12 hours. The scope of the project included BOMA reporting and CAD, and while the parking garages were not initially part of the scope, we walked the garage with SLAM so had a 3D database in case it was needed in the future, and in this case, it was needed in less than a week and we did not need to revisit the site, saving the client both time and money.
Process: Walk each floor with SLAM, create 3D database by floor. Build out interiors, sample floor, with PKNail Pro, capturing typical window assemblies, doors, plumbing objects, wall thicknesses. Back office included the combination of surveying data, creating spaces within Revit and exporting both spreadsheet data, CAD and plotted floor plans.
SLAM : A Revolution in Building Surveying & Documentation
Posted by Jim Foster in 3D, BIM, Built Environment, Existing Conditions, New Technologies, Open Engine, SLAM on October 3, 2016
 SLAM technology. SLAM, besides sounding rather cools stands for ( Simultaneous Localization and Mapping). And this is is an evolution in the creation of point clouds. Why? SLAM technology allows a user to walk through space, and in essence, create a continuous point cloud of an entire space. Previous technologies require a machine to be placed on a tripod, and continually set up in different locations. To get a full ‘picture’ of whatever you are scanning separate scans have to be ‘stitched’ together, which is not as automated a process as you might imagine. While Leica continues it onslaught of proprietary products and continuous scanning with its Pegasus systems, SLAM is based on open standards and researched extensively through the robotics industry. Off the shelf technology in the form of Hitachi Lasers, Rasberry Pi Processors and the like will start to open up new devices and allow new manufacturers to enter what has been a highly technical and closed field.
SLAM technology. SLAM, besides sounding rather cools stands for ( Simultaneous Localization and Mapping). And this is is an evolution in the creation of point clouds. Why? SLAM technology allows a user to walk through space, and in essence, create a continuous point cloud of an entire space. Previous technologies require a machine to be placed on a tripod, and continually set up in different locations. To get a full ‘picture’ of whatever you are scanning separate scans have to be ‘stitched’ together, which is not as automated a process as you might imagine. While Leica continues it onslaught of proprietary products and continuous scanning with its Pegasus systems, SLAM is based on open standards and researched extensively through the robotics industry. Off the shelf technology in the form of Hitachi Lasers, Rasberry Pi Processors and the like will start to open up new devices and allow new manufacturers to enter what has been a highly technical and closed field.
While SLAM devices do not have the high fidelity of HDLS, it does allow for some pretty excellent data collection that is typically at a level needed for most building documentation, leaving highly specific / detailed tasks for the more heavyweight scanners, think exposed and extensive MEP, physical plans, historic documentation/reconstruction. Personally, using SLAM devices in combination with our PKNail Pro allows us to move through spaces quickly, efficiently, accurately capturing building geometry with both systems and creating dimensionally accurate Revit objects on the fly with PKNail Pro. This allows us to get in and out of space with minimal interruptions, and allows for quick turn around which is great for building owners/investors through due diligence, BOMA calculations or looking to repurpose/reprogram a building. Recently, we were in and out of 300,000SF of tower in Wilmington Delaware in less than 36 hours.
While SLAM allows for the quick collection of data, interpreting, understanding the data and turning the data into usable documentation still remains very much a craft process. Too many times I have seen a product, such as a Revit model, turned out by groups who fail to understand how building are put together and designed which eventually turns into a product that confuses and confounds the people/architects who need to use it. In the next post I hope to dive into this process vs. product a bit deeper.
